ARGO - łazik marsjański z Politechniki Białostockiej bierze udział w Canadian International Rover Challenge 2018
Jest to konkurs łazików budowanych przez studenckie zespoły z całego świata. Podobnie jak w przypadku innych zawodów, takich jak University Rover Challenge w USA, European Rover Challenge, UK Rover Challenge i Indian Rover Challenge, zadania stawiane przed zespołami symulują funkcjonowanie kolonii zakładanej na planecie pozaziemskiej. Analogi łazików marsjańskich staną przed koniecznością rozwiązywania różnych problemów, które mogą pojawić się w czasie eksploracji kosmosu. Wśród nich jest pokonywanie trudnego terenu czy autonomiczne operacje wymagające obsługi robota. Wyzwania stawiane przed drużynami są tak pomyślane, by nagradzać innowacyjny i kreatywny projekt.

Zawody odbywają się w Drumheller w Kanadzie w dniach 10-13 sierpnia.
Po raz pierwszy konkurs zorganizował zespół University of Saskatchewan Space Design (USST) w lipcu 2017 r. Celem tego przedsięwzięcia było umożliwienie przetestowania analogów łazików marsjańskich poza laboratoriami, w których powstały.
ARGO powstał na Wydziale Mechanicznym Politechniki Białostockiej. Zespół konstrukcyjny tworzyli studenci: inż. Aneta Łukowska, Piotr Tomaszuk, Barbara Kuc, Igor Tylman, Paweł Rółkowski, Adam Buczyłowski, Jakub Czygier, Karol Haraburda, Paweł Straszyński, Kamil Kamieński oraz Paweł Frejda, Damian Łapiński, Łukasz Ornowski, Łukasz Magnuszewski, Maciej Leszczyński, Maciej Ołdakowski. Studenci pracowali pod opieką dr. hab. inż. Kazimierza Dzierżka oraz mgr. inż. Macieja Rećko i mgr. inż. Michała Ostaszewskiego, którzy uczestniczyli w latach ubiegłych w międzynarodowych zawodach łazików marsjańskich na pustyni w stanie Utah w USA.
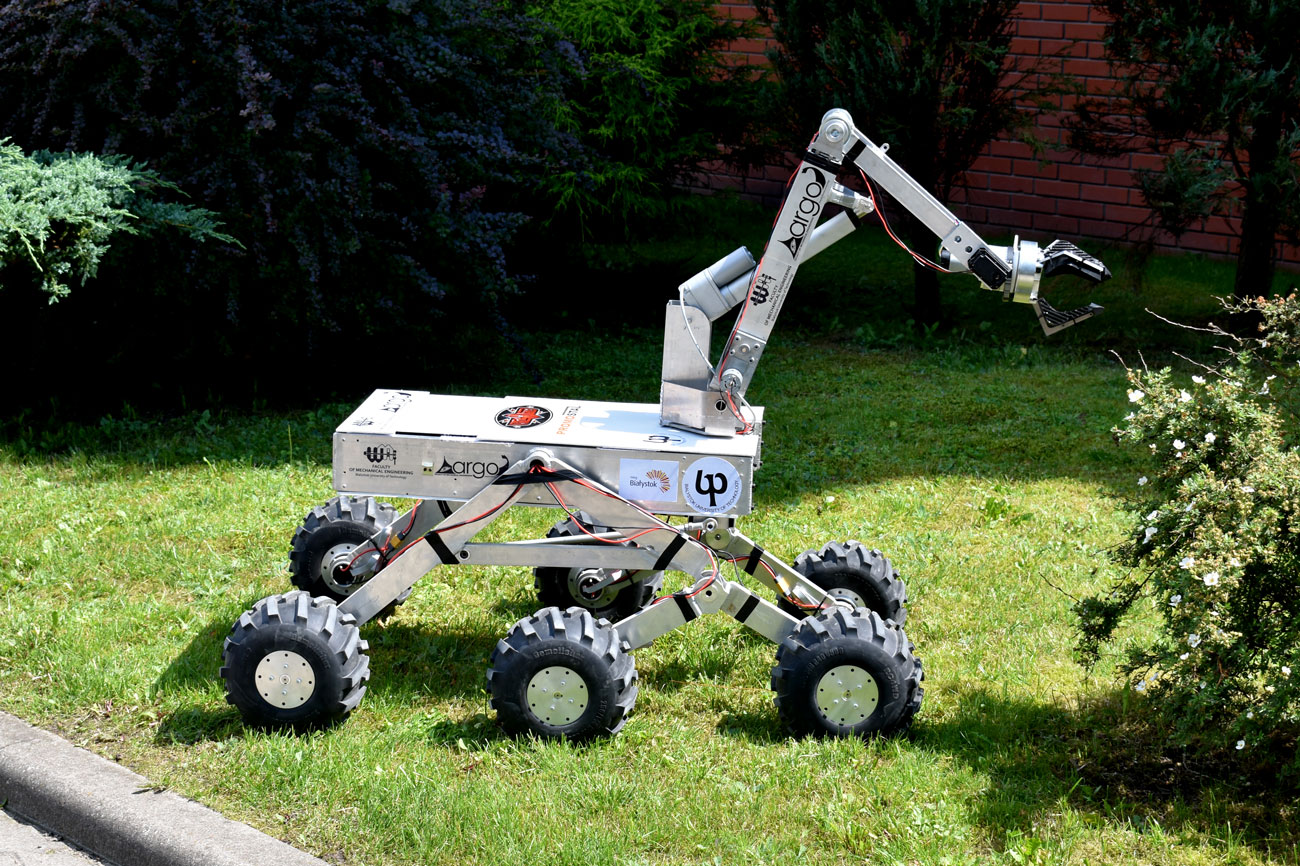
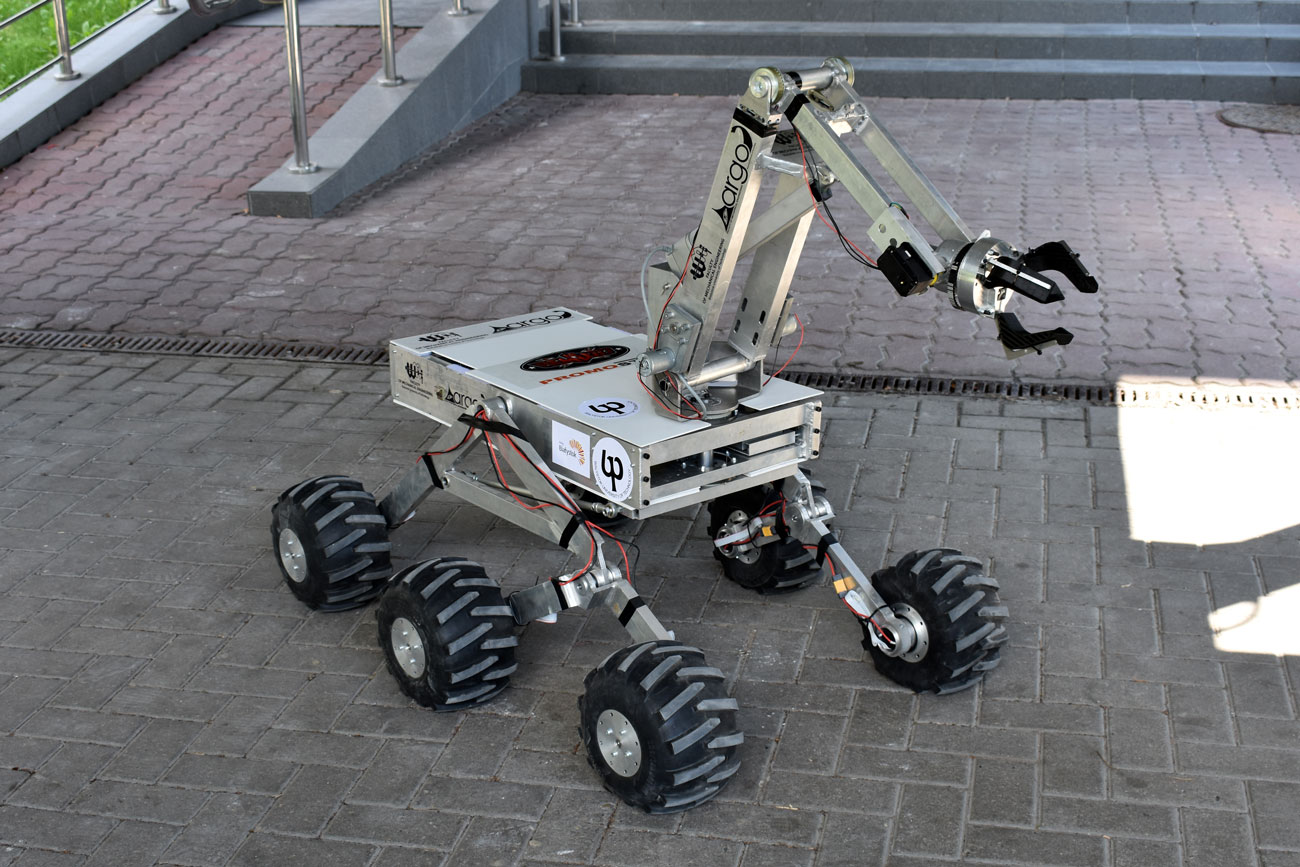
Konstruktorzy ARGO tak charakteryzują swego robota:
· zawieszenie terenowe oparte na mechanizmie rocker-bogie, co umożliwia podniesienie każdego z kół na wysokość 40cm, podczas gdy pozostałe koła dotykają podłoża
· zintegrowane koła wraz z silnikami, kompaktowe proste rozwiązanie, szczelne, chronione przed wpływem środowiska
· lekkie i bardzo wytrzymałe podwozie wykonane z profili aluminiowych
· mechanizm różnicowy pozwalający na niezależne działanie każdego wahacza
· brak dodatkowej amortyzacji i wcześniej wymienione rozwiązania pozwalają na płynny ruch pojazdu oraz zapewniają 3 punkty podparcia
· ramię robota - bardzo stabilne i wytrzymałe, sztywna konstrukcja z profili aluminiowych
· pierwszy człon ramienia/manipulatora napędzany jest precyzyjnym siłownikiem elektrycznym; drugi człon - napęd na paskach zębatych, efektor końcowy wyposażony jest w serwomechanizmy
· 3-palczasty chwytak, zastosowano nasadki adaptacyjne na palce chwytaka wydrukowane w technologii 3D z gumy
· kompaktowa konstrukcja chwytaka, zintegrowany układ pochylania i obrotu
· gimbal do kamery w całości wykonany w druku 3D, również zastosowano druk 3D do elementów takich jak akcesoria do robota - zamykane, szczelne pudełka do badania pobranej gleby
· dodatkowy wymienny efektor końcowy do pobierania próbek gleby
· pokładowa sieć Ethernet
· zintegrowany system wizyjny złożony oparty o serwery video wykorzystujące kamery analogowe i cyfrowe
· aplikacja do sterowania robotem jest czytelna i wygodna dla operatora, została podzielona na sekcje, w których znajdują się informacje m.in. o położeniu robota, trybie w jakim się znajduje, podglądzie z każdej z kamer, odczytach z czujników
· własny protokół komunikacyjny i szereg innych zabezpieczeń
· system rozpoznawania obiektów oparty o mikrokomputer graficzny NVIDIA Jetson TX2
· tryb jazdy autonomicznej
· wykorzystanie stereowizji do znajdowania przeszkód
To już siódmy analog łazika marsjańskiego, który powstał na Wydziale Mechanicznym Politechniki Białostockiej.
Budowę najnowszego łazika marsjańskiego Politechniki Białostockiej wsparł Prezydent Białegostoku w ramach umowy dotyczącej promocji miasta.
Za: Politechnika Białostocka